Alessandro Tenaglia
Ph.D. Student in Automation and Control Engineering
University of Rome Tor Vergata
Biography
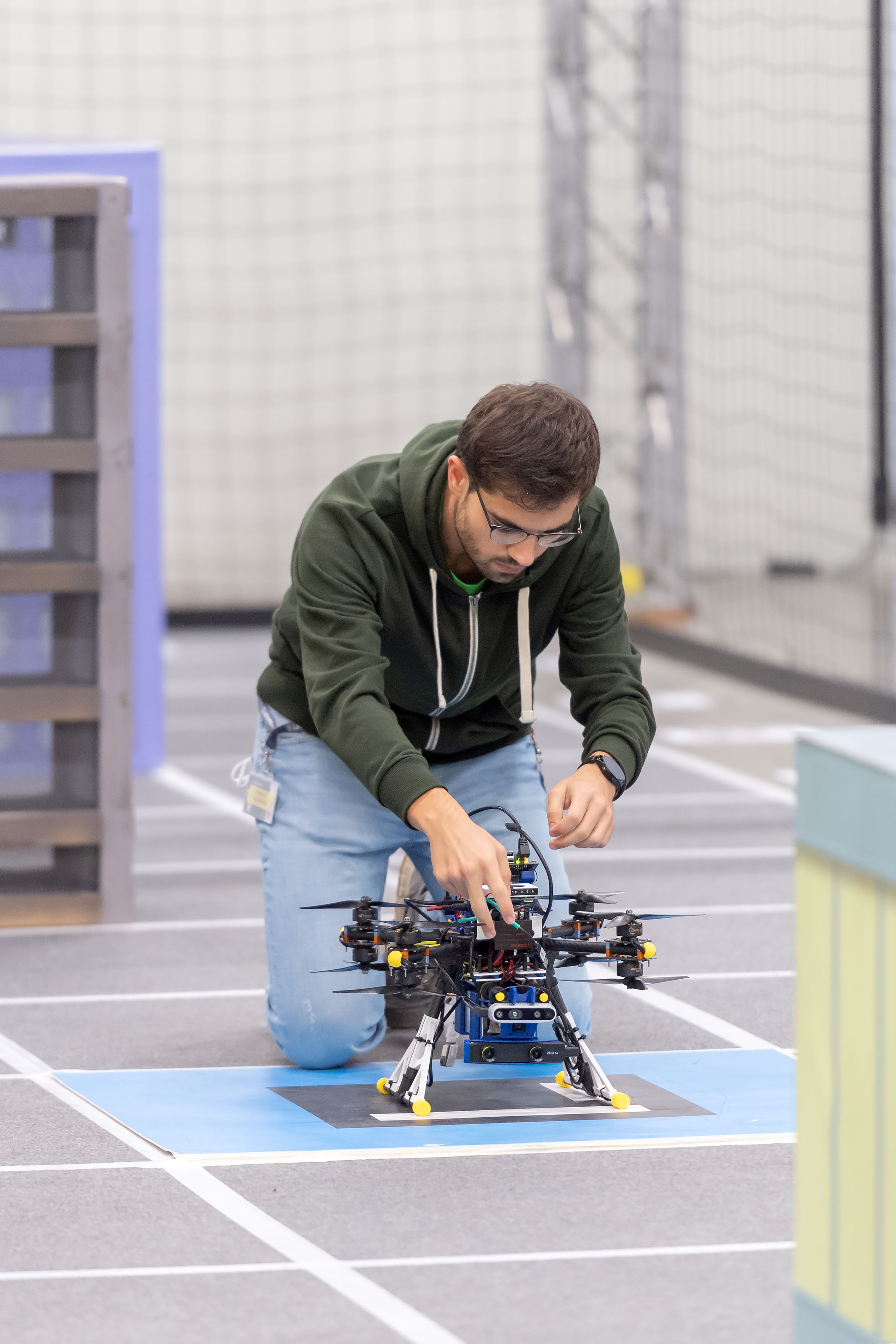
Alessandro Tenaglia was born in Rome, Italy, in 1997. He received a Bachelor’s Degree in Computer Engineering and a Master’s Degree in Automation Engineering from the University of Rome Tor Vergata, both summa cum laude, in 2019 and 2021, respectively. He is currently pursuing a Ph.D. program in Computer Science, Control, and Geoinformation at the University of Rome Tor Vergata. His research interests include control allocation techniques, magnetic control of tokamak plasmas, and autonomous navigation algorithms for unmanned systems. Since 2021, he has actively contributed to the University of Rome Tor Vergata team, participating in the Leonardo Drone Contest, leading to the victory of various awards. Currently, he is pursuing a one-year visiting period at the Swiss Plasma Center, École Polytechnique Fédérale de Lausanne (EPFL), Switzerland, working on the magnetic control system of the TCV tokamak.
- Artificial Intelligence
- Control allocation
- Control of tokamak plasmas
- Unmanned systems
Visiting Ph.D. Student at Swiss Plasma Center, today
Ecole Polytechnique Fédérale de Lausanne (EPFL)
Ph.D. Student in Computer Science, Control, and Geoinformation, today
University of Rome Tor Vergata
MSc in Automation Engineering, 2021
University of Rome Tor Vergata
BSc in Computer Science, 2019
University of Rome Tor Vergata
Experience
Projects

Publications

Gallery





Contact
- alessandro.tenaglia@uniroma2.it
- +39 06 7259 7701
- Via del Politecnico 1, Roma, 00133
- Edificio Ingegneria dell’Informazione, Corpo D, Piano Terra